ControlNet
Published:
论文题目:Adding Conditional Control to Text-to-Image Diffusion Models
发表会议:International Conference on Computer Vision(ICCV 2023, Best Paper(Marr Prize))
第一作者:Lvmin Zhang(PhD with Stanford University)
Question
如何在 Text-to-Image Diffusion 图像生成模型中添加条件控制其图像的生成(这里的条件主要包括 visual condition,如 mask, depth等,即输入的条件也是图像),同时保证其生成图像的逼真性。
Preliminary
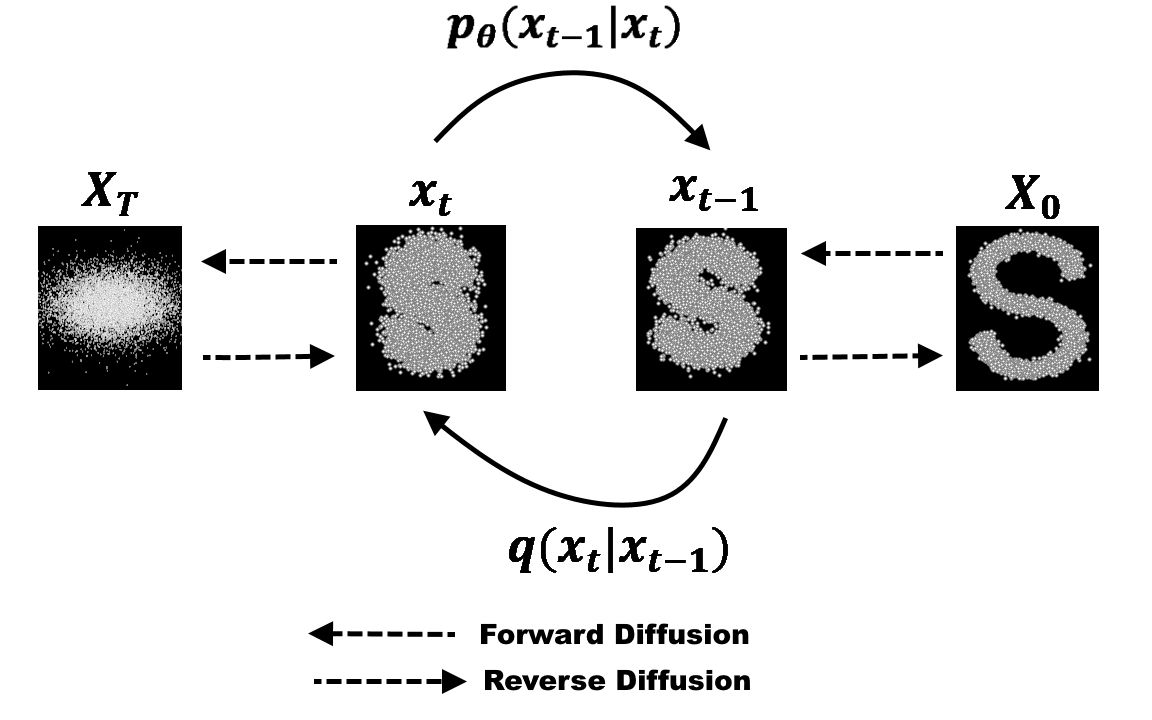
Diffusion Model:扩散模型是近年来最热的图像生成思想。 将任意一张图像 $I_0$ 进行噪声添加,每次添加一个服从 $N(0,1)$ 分布的随机噪声 $\epsilon_t$,获得含有噪声的图像 $I_t$,则进行了无数次后,原本的图像就会变成一个各向同性的随机高斯噪声。 按照这个理论,我们对一个各向同性的随机高斯噪声每次添加一个特定的服从 $N(0,1)$ 分布的噪声 $\epsilon_t'$,获得噪声量减少的图像 $I_t'$,则经过足够多次后便可获得一张逼真的图像 $I_0'$。 为此,我们可以选择任意一个图像生成模型 $M_G$ (例如 U-net 等),第 t 次时输入第 t-1 次生成的图像 $I_{t-1}'$,输出生成的图像 $I_t'$。 由于每次使用的是同一个图像生成模型 $M_G$,所以需要输入时间步信息 $t$ 来告诉模型现在是生成的第几步 (一个直观的理解是在随机噪声恢复成原始图像的前期,模型更关注图像的整体恢复,而后期则更加关注图像的细节恢复,所以需要时间步信息告诉模型现在是偏前期还是后期)。 同时通过 $I_{t-1}$ 直接生成 $I_t$ 较为困难,因为它需要生成正确其每个像素值,而每次添加的噪声 $\epsilon_t$ 较容易预测。 因此可以更换为每次输入 $I_{t-1}$,模型预测第 $t$ 次所加的噪声 $\epsilon_t$。所以损失函数为 $L = E_{z_0, t, c_t, \epsilon \sim N(0,1)}[||\epsilon - \epsilon_{\theta}(z_t, t, c_t)||_2^2]$。 其中 $z_0$ 是原始噪声(即一开始输入的图像),而 $z_t$ 是第 $t$ 步输出的图像, $\epsilon_{\theta}(z_t, t, c_t)$ 为模型预测的第 $t$ 步所加的噪声。
Method
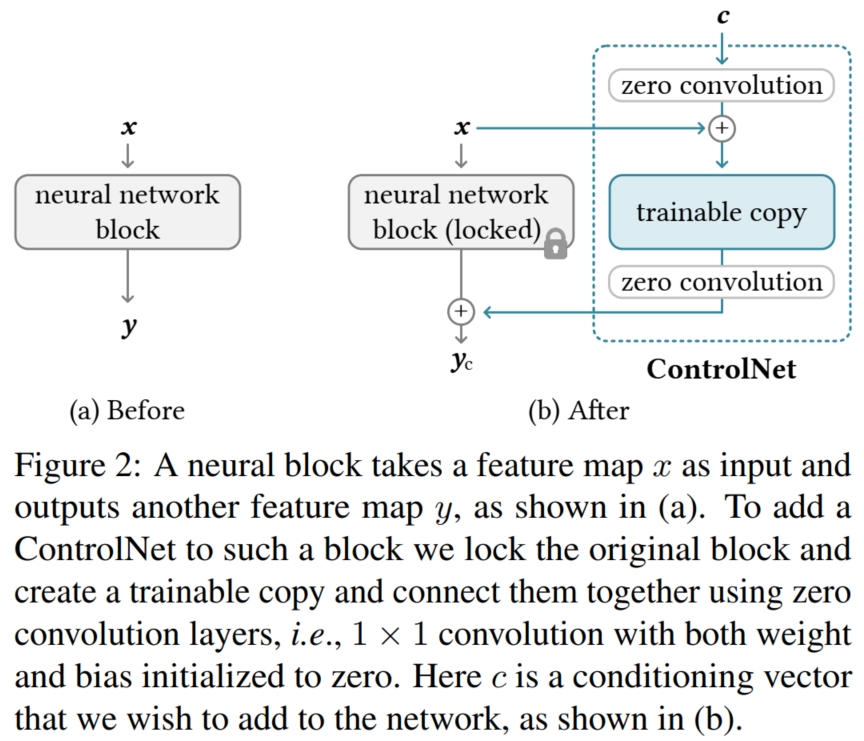
这个问题最简单的方法是找到一个带有该条件(假设为 $C_i$)的数据集,再在别人已经预训练好的 Difussion 模型上进行微调。 但是这么做有一个问题:因为预训练的 Diffusion Model 是在大量图像上训练而来,如果直接将整个模型直接进行有监督微调,可能会使得模型生成效果大打折扣(即文中说的 overfitting 和 catastrophic forgetting)。 所以本文解决的是在加入了条件 $C_i$ 的情况下,既能输出符合条件 $C_i$ 的图像,又能保证其逼真度;同时,本文还解决了多个 $C_i$ 同时作用于一张图像的生成问题,并且训练的参数也较少。 本文的方法较为简单,可以看作是一个即插即用的插件模块。如图,对于任意一个 Diffusion 模型,它通常是由每个基本单元块 $net_{b}$ 组成(如 resnet block, transformer block等)。 原始的 Diffusion 模型输入上一次 $net_{b}$ 生成的 feature map $x$,输出更新的 feature map $y$。 而 ControlNet 保持每个 $net_b$ 的参数不动(即 freeze parameter),并复制出一个相同的 $net_b'$,称为 $trainable\ copy$,作为条件 $C_i$ 的处理模块。 并在 $trainable\ copy$ 前后都添加了额外的模块 $zero\ convolution$:它是一个卷积层,其卷积核权重和偏置都初始化为 0。 设 $net_b$ 的数学函数为 $\digamma(x;\Theta)$,$zero\ convolution$ 的数学函数为 $Z(·;·)$, 则 ControlNet 的输入输出公式为 $y_c = \digamma(x;\Theta) + Z(\digamma(x + Z(c;\Theta_{z1});\Theta_c); \Theta_{z2})$。 由于 $zero\ convolution$ 的参数初始化为 0,所以 $Z(c;\Theta_{z1}) = 0$, $\digamma(x + Z(c;\Theta_{z1});\Theta_c) = \digamma(x;\Theta_c)$,则 $trainable\ copy$ 在开始时依旧接收 $x$ 作为输入,和无条件训练的情况一致。 这样可以极大程度保持原始预训练模型的 capability。 同时 $Z(\digamma(x + Z(c;\Theta_{z1});\Theta_c); \Theta_{z2}) = 0$, 所以 $y_c = \digamma(x;\Theta) + Z(\digamma(x + Z(c;\Theta_{z1});\Theta_c); \Theta_{z2}) = \digamma(x;\Theta)$。 这样,在训练刚开始时,有害噪声就不会影响 $trainable\ copy$ 中神经网络层的隐藏状态。 而训练损失函数则和普通的 Diffusion Model 类似:假设 time step 为 $t$(Diffusion 模型训练的时间步), text prompts 为 $c_t$(文本条件), visual condition 为 $c_f$(即我们自己添加的额外条件),训练模型为 $\epsilon_{\theta}$, 则损失函数为 $L = E_{z_0, t, c_t, c_f, \epsilon \sim N(0,1)}[||\epsilon - \epsilon_{\theta}(z_t, t, c_t, c_f)||_2^2]$。 其中 $z_0$ 是原始噪声(即一开始输入的图像),而 $z_t$ 是第 $t$ 步输出的图像。
对于多个条件 $c_1,...,c_n$,本文采用最直接的方式,直接将每个条件 $c_i$ 对应的 ControlNet 的输出相加, 即 $y_c = \sum_{i=1}^n{y_{c_i}}$。 没有任何额外的权重或线性插值。