PaclMap
Published:
论文题目:Multipattern Mining Using Pattern-Level Contrastive Learning and Multipattern Activation Map
发表期刊:IEEE Transactions on Neural Networks and Learning Systems(TNNLS 2022, 2023年 CCF B)
第一作者:Xuefeng Liang(Professor with Xidian University);h指数 18(2023)
Question
文章主要解决的问题是如何在不知道 visual pattern 的 label 和 number 的情况下找出某一类图像的所有 visual patterns。
Preliminary
visual pattern:它是一种临界于 pixel 和 category label 之间的语义特征,即它的语义信息比单纯的像素高,但是又低于图像本身的类别。一类图像中可以包含多个 visual patterns,它们都独特地描述了该类图像(即其他图像不存在或者不是其他图像的显著性特征)。 一个通俗直观的例子是,对于西安的鼓楼,所有的 鼓楼 照片都有 category label —— 鼓楼;而鼓楼中含有其标志性代表 鼓 和 楼,它们两个就是 鼓楼 这类图像的 visual pattern。 虽然其不一定都在每张 鼓楼 照片中出现,但是每张照片都至少出现一个 visual patter,且统计下来,这两个 visual pattern 在 鼓楼 照片中出现的次数远超其他类别,同时它们又都带有一定的语义信息,所以它们便是 鼓楼 类照片的 visual patterns。 然而对于更加广泛的 visual pattern 来说,它们的语义信息可能不如前面那个例子那么直观,例如纹理等,一方面给每类图像标记 visual pattern 标签是一类难题;另一方面人工寻找每类图像的每个 visual pattern 也是一类难题。 因此,现在的方法大部分都使用模型输出的 feature 作为每类图像的 visual pattern(例如 CNN 卷积层输出的 activation)。 虽然其相较 鼓、楼 这种实质性标签难以理解,但是好处是不需要确定其具体含义(这样就不需要费力进行 visual pattern 标签标记),同时其也含有和实质性标签本质一样的语义信息。
Contrastive Learning:对比学习是最近十分火热的无监督学习方法,它通过构造 self-supervision 来实现网络训练。 大体上,对比学习采用两个网络(分别叫 online network 和 target network)进行训练,online network 输入原始图像,其输出一段 vector 作为特征 $f_1$, 而 target network 输入对应原始图像的正样本(它与原始图像互为正样本对,通常是原始图像通过数据增强得来,比如旋转),其也输出一段 vector 作为 $f_1$ 的正样本特征 $f_2$。 对于 $f_1$ 和 $f_2$,我们希望它们两的特征应该相似,所以可以使得它们的相似度函数 $sim(f_1, f_2)$(最简单的是点乘,然后正则化:$\frac{f_1f_2^T}{\sqrt{f_1f_1^T}\sqrt{f_2f_2^T}}$)的值接近 1。 然而这种方法有一定的弊端, 那就是模型可能会找到一条”捷径“,online network 和 target network 对于每一个输入,都输出相同的 vector(比如全 0),这样就可以保证每个正样本对之间的相似度为 1。 因此,我们需要引入负样本(通常是和原始图像不同的任意其他图像,其通过 target network 的输出向量为 $f_3$)来限制模型的输出。 我们希望 $f_1$ 和 $f_3$ 应该不相似,所以可以使得它们的相似度函数 $sim(f_1, f_3)$ 的值接近 0。 通常而言每个原始图像的正样本就一个,而负样本可以很多个(一个直观的理解是对于负样本,模型可以很容易判断其和原始图像不相似,如果就只使用一个负样本,则会导致负样本基本上没贡献)。 这就和传统的分类问题较为相似(把正确的类别看作正样本,其他类别均看作负样本), 因此可以使用 BCE loss 进行训练:$-log\frac{exp(sim(f_i,f_+)/\tau)}{\sum_{j,f_j \neq f_+}^{N}{exp(sim(f_i, f_j)\tau)}+exp(sim(f_i,f_+)/\tau}$。 其中 $\tau$ 表示温度因子,其越小则使得不相似的负样本的影响越大(可以简单理解:exp函数在 $[0,1/\tau)$ 的区间内的趋势随着 $\tau$ 的增大越趋于平稳, 由于 $sim(·,·)$ 函数最大值为 1,若 $\tau$ 越大,则会使得 $sim(·,·)/\tau$ 的值域越趋于 0,则经过 $exp$ 函数后使得 $sim(·,·) = 1$ 和 $sim(·,·) = 0$ 的值越相似, 就使得各个样本之间的相似度差值对模型的训练影响越小(无论是与原始样本 $f_o$ 相似度很大的负样本($sim(·,·) \approx 1$),还是相似度很小的负样本($sim(·,·) \approx 0$),其对模型训练的贡献都差不多)。 最终训练出来的 online network 具有很好的模型先验,可以送到下游任务进行微调使用。
Method
在之前的方法中,它们都假设每类图像只存在一个 visual pattern, 这样就可以通过构造 category label 到 visual pattern 之间的一一映射以获得 visual pattern。 但是本文认为每类图像不止一个 visual pattern,需要在仅仅知道 category label 的情况下将它们都找出来。 一般来说,visual pattern包含两个特点:discrimination 和 frequency。 discrimination 表示其具有可判别性,而不是笼统的语义信息(例如 山 这个语义信息就具有笼统性);frequency 表示其应该在该类图像中频繁出现。
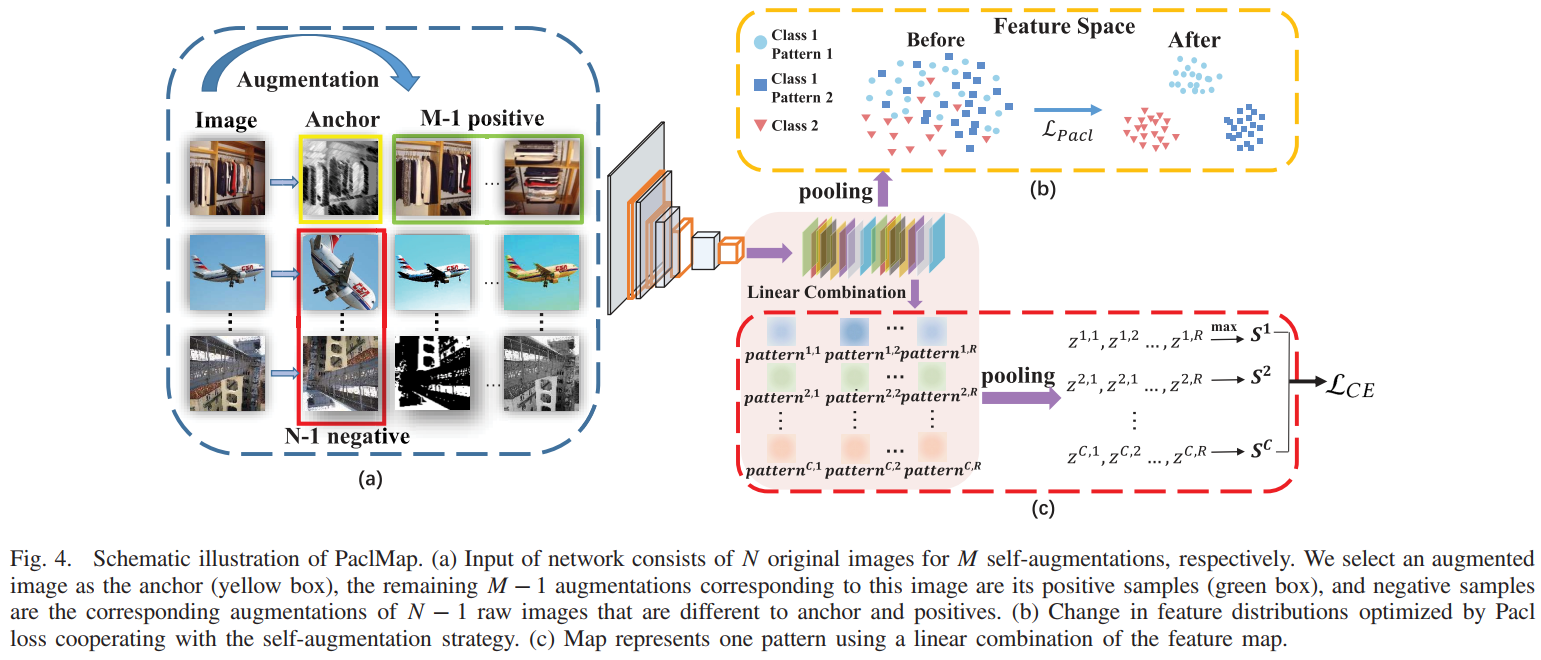
因此,针对 frequency,本文提出了 Pacl 模块。其对于对比学习的整体框架没有改变,只是改变了损失函数和正负样本的选择。 其中,对于负样本,由于我们需要减少错误的负样本对于模型学习的影响,而错误的负样本提出与原始样本(anchor)相似度较高,所以本文选择较大的 $\tau$。 同时,对于相似度函数,本文采用 $cos^2(·|·)$,因为我们希望原始样本和负样本以及各个负样本之间不存在相关性。 如果使用 $cos(·|·)$,则 $= 0$ 时,各个负样本的向量都与原始样本垂直,则各个负样本相互平行(即相关); 而使用 $cos^2(·|·)$,当各个负样本的向量都与原始样本垂直时,各个负样本不相互平行(即不相关)。 对于正样本,由于对比学习的正样本仅有一对,导致其学习到的特征更多的是当前图像的特征(它可能包含了不必要的细节,即 more fine-grained)。 因此 Pacl 通过构造多组 postive-anchor 对来鼓励模型学习更为一致性的特征。 具体而言(如图1中 (a)),每个 batch 包含 $N$ 个原始图像的 $M$ 个数据增强。首先选择一个增强后的图像作为 anchor(黄色框), 然后使用其他 $M - 1$ 增强后的图像作为正样本(绿色框),并使 $M - 1 > (N - 1)/C$ (其中 $C$ 是数据集中类别的数量)。 负样本(红框)包含其他 $N - 1$ 个原始图像的增强。并且 batch 中的所有 $N × M$ 张图像依次被选为 anchor 进行训练。 得到损失函数为 $L_{Pacl} = -\frac{1}{M-1}log\frac{\sum_{i=1}^{M-1}exp(sim(f_o,f_{i+})/\tau)}{\sum_{i=1}^{M-1}{exp(sim(f_o,f_{i+})/\tau)} + \sum_{j=1}^{N-1}{exp(sim(f_o,f_{j-})/\tau)}}。$ Pacl之所以可以学习到 frequency,我的理解是对比学习本身的优势。 举个简单的例子,经过对比学习之后,可能模型对 松 这个概念有了一个统一的理解(虽然模型并不知道它叫松),对于每张出现 松 的图像它都可以辨别出来, 但是这时它学到的 pattern 太笼统了(它仅仅只是对松有理解,而我们更希望它学习到 黄山迎客松 这种更具有 discriminative 的 pattern),就需要进一步对其 discriminarion 进行学习。
因此,针对 discrimination,本文提出了 Map 模块。由于本文的是 multipattern,即多对一的映射,因此不能直接转化为一对一的分类问题。 在 visual pattern 中讲过,目前的方法大都使用模型输出的 feature 作为 pattern,但是并不是简单地把 feature 直接等于 pattern,一般是将最后一层 conv 输出的 feature maps 进行线性结合形成一个 pattern。 由于本文讨论的是 multipattern,所以需要输出多个 pattern,它采用的方法和卷积有些相似,即通过不同的线性权重 $\omega_i^j$ 来获得不同的 pattern $P^j$。 具体而言,对于最后一层卷积输出的 feature maps $V = \{V_1,...,V_K\}$,定义一个最大可能的 pattern 数量为 $R$,使用 $R$ 组权重(每组 $K$ 个)来获得每类图像的 $R$ 个 pattern(称为 Map,每个 pattern 称为 PAM):$PAM^{c,r} = \sum_k{\omega_k^{c,r}V_k}$。 这样一来,$K$ 个 feature maps 就生成了 $C * R$ 个 PAM。接下来便是如何将它们与一一映射的分类问题结合起来,以实现训练。 因为 category label本身具有非常强的 discrimination 特性,以它为监督信号优化得到的 pattern 会比单纯对比学习的 pattern 的 discrimination 更强。 因此,本文首先对每个 PAM 进行降维,即使用 global average pooling 将每个 PAM 降为 1 个实数($H * W \rightarrow 1$):$z^{c,r} = avgpool\{PAM^{c,r}|r=1,...,R\}$。 接着再使用 max 函数将每类的 $R$ 个 PAM 减少至 1 个:$S^c = max\{z^{c,r}|r=1,...,R\}$,这样就可以把 $C$ 个 $S^c$ 和 $C$ 个类别对应起来。 再经过 softmax 正则化后;$\widehat{y^c} = \frac{exp(S^c)}{\sum_c{exp(S^c)}}$。 最后就可以使用 cross entropy 损失进行训练:$L_{CE} = \frac{1}{N}\sum_{n=1}^N{(\sum_{c=1}^C{(-y^clog\widehat{y^c})})}$。
因此,最后的损失函数为 $L = \lambda * L_{CE} + (1-\lambda) * L_{Pacl}。$