Glossification with Editing Program
Published:
论文题目:Transcribing Natural Languages for the Deaf via Neural Editing Programs
发表会议:Association for the Advancement of Artificial Intelligence (AAAI 2022)
第一作者:Dongxu Li (Australian National University, currently in Salesforce AI)
Question
如何通过有效挖掘 sentence 和 glossed 之间的句法联系来提高 glossification 的准确率。
Preliminary
glossification:gloss 是手语的一种书面形式,它通常是通过手语视频翻译而来,其中每个词语和手语视频中的每个动作都一一对应。 通常而言,gloss 会比 sentence (即我们日常说话使用的语句)更加简洁,同时因为它是按手语视频的动作及顺序翻译而来的,因此和 sentence 拥有不同的语法规则, 但是它拥有和 sentence 相似甚至相同的字典集(即它们所用的词汇表是相似/相同的)。 例如,对于正常的 sentence "Do you like to watch baseball games?",表达成 gloss 就变成了 "baseball watch you like?"。 而 glossification 任务就是要将正常的 sentence 翻译为 gloss,以便后续继续翻译为手语视频。
Editing Program:对于一个给定序列 $seq_o$,可以通过一系列 editing actions 操作将其变成另一个序列 $seq_t$。 其中,editing actions 包括 1) $Add\ e\ i$,即在序列 $seq_o$ 的第 $i$ 个位置添加元素 $e$; 2) $Del\ i$,即删除序列 $seq_o$ 的第 $i$ 个位置的元素; 3) $Sub\ e\ i$,即将序列 $seq_o$ 的第 $i$ 个位置的元素替换成元素 $e$。 而将序列 $seq_o$ 变成另一个序列 $seq_t$ 的一系列 editing actions 操作称为 Eiditing Program。
Method
可以看到,glossification 是一个 Machine Tranlation 问题。最直观的做法是使用 encoder-decoder 架构,输入 sentence,输出预测的 glosses。 但是,和普通的 Machine Translation 不同的是:一方面, sentence-glosses 的数据集较少,如果直接采用传统的 Machine Translation 方式可能效果不佳;另一方面,和传统的 Machine Translation 不同, sentence 和 glosses 的字典集是相同的,仅仅是语法规则不同,这就意味着它们之间存在着很强的句法联系。因此,本文便通过利用它们之间的句法联系作为先验知识来帮助模型学习,以减轻数据集匮乏的问题。 通过观察可以看到,sentence 和 glosses 不仅字典集相同,而且在每个 sentence-glosses 对中,glosses 的大部分单词都在对应的 sentence 中出现过(通常是保留关键词,删除次要词)。 因此,相比于直接预测 glosses,可以通过对 sentence 进行增删改操作(即 editing actions)来获得对应的 glosses。 这样,通过显式地引入转化过程可以更好地帮助模型学习(即之前需要模型自己摸索如何从 sentence 转化到 glosses,现在通过一步步的 editing action 显式地告诉模型转化规则)。 所以,模型不再直接预测 glosses,而是预测 editing program,并执行它以获得最终的 glosses。 具体而言,假设 sentence 为 $x = [x_1,...,x_m]$,glosses 为 $y = [y_1,...,y_n]$,它们拥有相同的 vocabulary $V$。 模型需要预测出合理的 editing program $z = [z_1,...,z_s]$,使得 $z(x) = y$。为此,本文设计了特定的 editing program 语法,如下图所示:
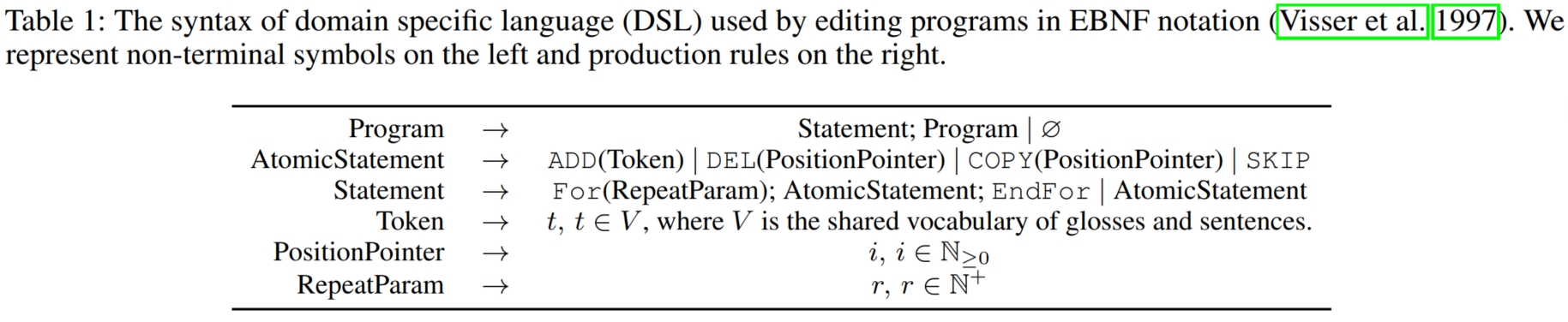
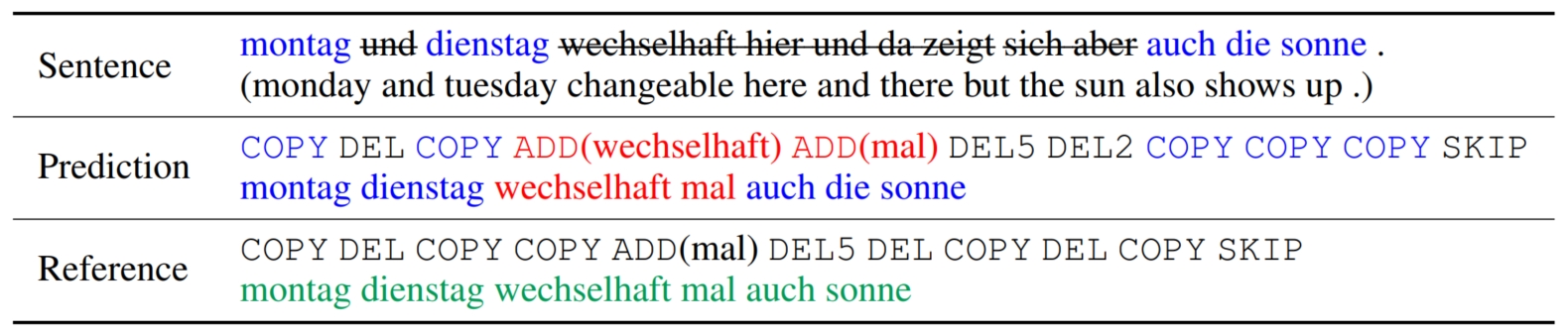
其中,$ADD(w)$ 表示从字典集中选择一个 token $w$ 加入到 $y$ 的最后; $DEL(k)$ 表示删除 $x$ 中第 $k$ 个位置的 token $x_k$; $COPY(k)$ 表示将 $x$ 中第 $k$ 个位置的 token $x_k$ 复制到 $y$ 的最后; $SKIP$ 表示删除 $x$ 中余下的所有 tokens,并结束。 为了使得程序更加简洁,本文通过引入一个 $executor\ point\ k$ 来表示当前 $x$ 的编辑位置。 具体而言,初始化 $k = 1$ 表示当前 $x$ 的编辑位置在 $x_1$。 接着,每当遇到一个 $DEL(k)$ 和 $COPY(k)$ 时,$k = k+1$ 表示当前 $x$ 的编辑位置向前一步,而当遇到 $ADD(w)$ 时,$k$ 保持不变,因为 $x$ 并未被编辑。 这样一来,在模型预测 $DEL$ 和 $COPY$ 时就无需预测需要操作的位置 $k$,因为其位置都由统一的 $executor\ point\ k$ 来表示。 更进一步地,本文还引入了 $For(·)$ 来支持重复操作,例如,如果一个 editing program 的某个位置有 $3$ 个连续的 $DEL$ 操作,则可以使用 $For(·)$ 进行压缩:$DEL\ 3$ (所以面对 $DEL\ n$ 和 $COPY\ n$ 时,$k$ 需要向前 $n$ 步)。 最终,模型需要预测的内容包括:1) editing action 的 name ($ADD/DEL/COPY/SKIP$);2) editing action 的重复次数,即 number。 (还不明白具体预测内容的可以看一下下图给出的具体例子) 这里有一个问题就是 $ADD$ 的特殊性,文章中并没有明确说明对于 $ADD$ 的预测。 我的理解是因为连续添加两个相同的词几乎不可能,因此无需预测 $ADD$ 的重复次数(默认只有一次),而是将预测得到的 number 表示为需要添加的 token 的标号。 这样就可以将所有 editing actions 的预测统一成预测 $name + number$。
确定了模型的输入和输出形式,接下来便是输入输出数据的构造和模型的设计、训练。和普通的 glossification 不同(glossification 数据集中只有 sentence + gloss,没有 editing program), 这里需要自己构建每个 sentence-glosses pair 对应的 editing program。为此,本文将该问题视为最短编辑距离(minimal editing distance)问题,并采用 DP 算法进行求解(剔除最短编辑距离问题中的 $Sub$ 操作), 求得最短编辑距离,然后通过回溯确定其 editing actions 序列,则该序列就是对应的 editing program。这样便自动构造了模型的输入输出。
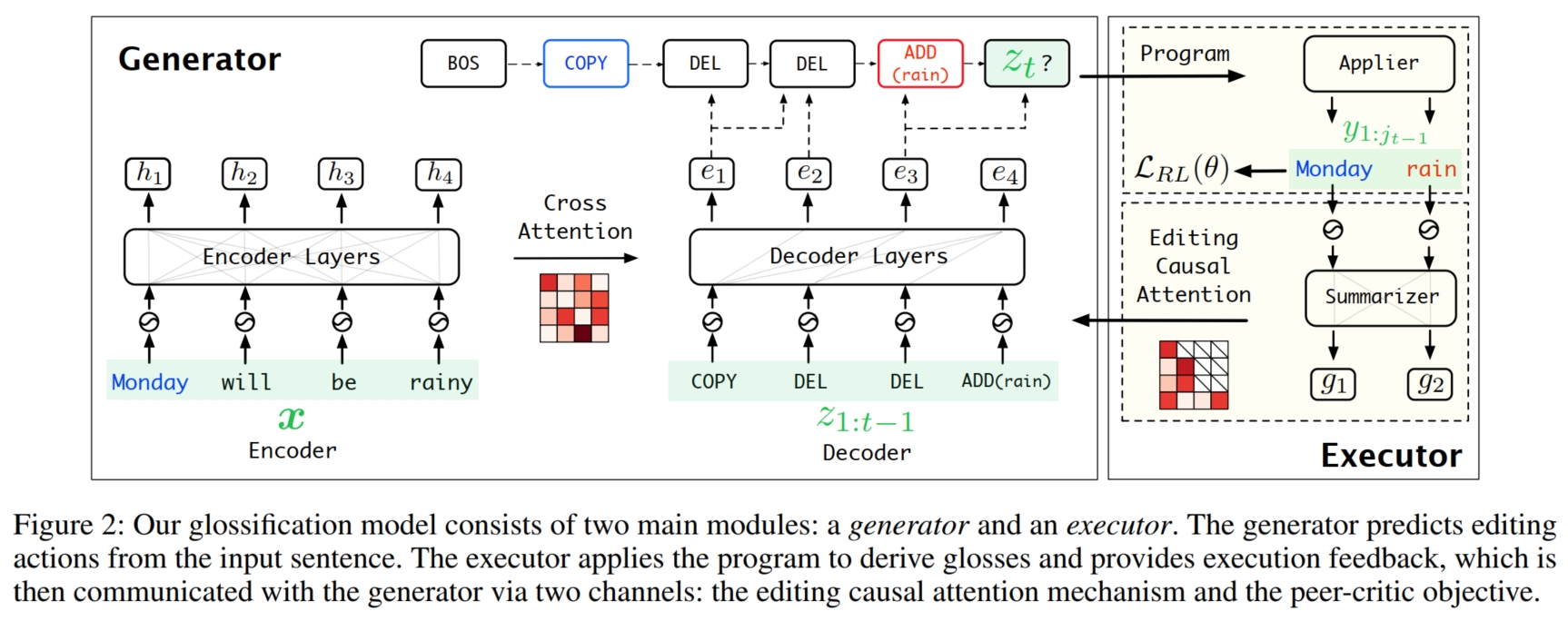
而在模型设计上,如上图,本文提出了 $generator$ 和 $executor$ 模块,前者通过深入理解 sentence 来一步步预测 editing program 中 editing action(即 step-by-step); 后者通过执行已经预测的 partial editing program 获得 partial glosses,并将 partial glosses 进行总结归纳然后反馈给 $generator$,使 $generator$ 在下一步的预测中能关注到之前预测的情况,进一步改进自己的预测。 具体而言,对于 $executor$,给定 sentence $x$ 和 $generator$ 生成的 patial editing program $z_{1:t-1}$, $executor$ 首先在 $x$ 上执行 $z_{1:t-1}$ 获得 partial glosses $y_{1:j_{t-1}}$ (通过使用前述的 $executor\ point\ k$,注意,没有被编辑的 $x_{k+1:m}$ 不算 partial glosses 的一部分)。 然后,$executor$ 使用 Encoder 对 $y_{1:j_{t-1}}$ 进行总结:先将 $y_{1:j_{t-1}}$ 转化为 embedding $\{E_{y_1},...,E_{y_{j_{t-1}}}\}$。 然后使用 Transformer Encoder 进行编码融合获得最终的总结 hidden embedding $g_{1:j_{t-1}}$:
其中 $P_i$ 表示位置编码,$EncoderLayer(·)$ 表示 Transformer Encoder Block(包括一个 MHA(self) 和一个 FFN),$l$ 表示第 $l$ 层。
对于 $generator$,由于仍然是一个序列预测问题,所以采用简单的 Transformer Encoder-Decoder 架构即可。 在第 $t$ 步时,其中的 Encoder 和 $executor$ 的 Encoder 类似,输入 sentence $x = [x_1,..,x_m]$,并将其映射为 hidden embedding $h = [h_1,...,h_m]$, 而 Decoder 则输入 Encoder 的输出 $h$,第 $t$ 步之前的全部预测 $z_{1:t-1}$,以及从 $executor$ 总结得到的输出 $g_{1:j_{t-1}}$, 然后预测 editing program 的第 $t$ 个 editing action $z_t$ (即建模条件分布 $P(z_t|h, g_{1:j_{t-1}}, z_{1:t-1}) \rightarrow P(z_t|x, y_{1:j_{t-1}}, z_{1:t-1})$)。 具体而言,首先将 $z_{1:t-1}$ 转化为 embedding $\{E_{z_1},...,E_{y_{t-1}}\}$,然后使用 Transformer Decoder 将 $E_{z_i}$ 和 $h_i$ 进行交互融合,得到 hidden embedding $e_{1:t-1}$:
其中 $P_i$ 表示位置编码,$DecoderLayer(·)$ 表示 Transformer Decoder Block(包括一个 masked MHA(self),一个 MHA(cross) 和一个 FFN),$l'$ 表示第 $l'$ 层。 注意,这里的 $DecoderLayer(·)$ 的第一个 MHA 是 masked 的。但是,因为 $y$ 的长度的动态变化性,在将 $g_{1:j_{t-1}}$ 融入到 $e_{1:t-1}$ 时不能使用常规的 Mask MHA。
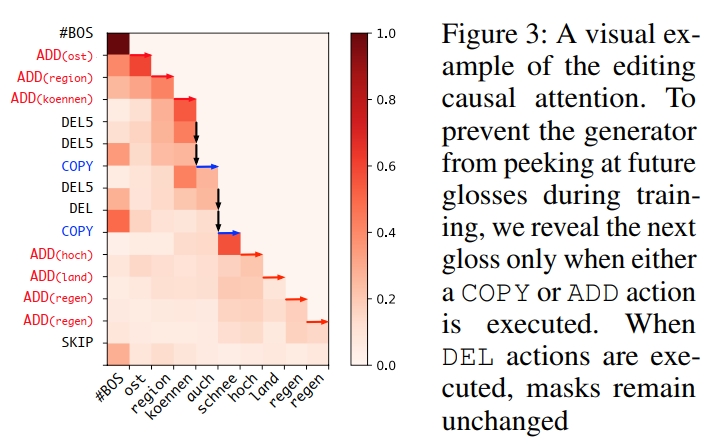
为此,本文在 Decoder 之后(即最后一层 $DecoderLayer(·)$ 之后)添加了一个 editing causal attention 模块替换 Mask MHA,并将 $executor$ 总结的 $g_{1:j_{t-1}}$ 与 $e_{1:t-1}$ 融合进行融合交互。 editing causal attention 和 Mask MHA 的结构十分类似,唯一的不同在于 Mask MHA 的 mask 是随着预测步骤 $t$ 单调递减的 (即每预测一步,就会解码出一个元素,即预测序列的长度 $+1$,mask 就 $-1$,表示该步的 ground-truth 已经可见), 而对于 editing causal attention 而言,每预测一步只会使得 editing program 的序列长度 $+1$,并不一定会使 $y$ 的序列长度 $+1$, 只有当 editing action 是 $ADD/COPY$ 时,$y$ 的序列长度才会 $+1$,此时 mask 才能 $-1$, 而当 editing action 是 $DEL$ 时,mask 保持不变(因为此时 $y_{1:j_{t-1}}$ = $y_{1:j_{t}}$,其长度没有增加),因此需要根据已经预测的 editing program 中的 editing action 的类型来确定每一步的 mask。 为此,本文使用 $generator\ point\ p$ 来表示当前已经预测的 $y$ 的长度,即 $j_{t-1}$。 对于预测的每一步 $t$,首先将 $p$ 初始化为 0,表示初始的 $y$ 是空的。当 $executor$ 执行一个 $ADD/COPY$ 时,$p = p + 1$ 表示 $y$ 的序列 $+1$;而当 $executor$ 执行一个 $DEL$ 时,$p$ 保持不变。 这样,就可以帮助 $generator$ 的 editing causal attention 构造 mask,其中 $> p$ 的位置全部掩码。所以 editing causal attention 的表达式如下:
其中 $Q$ 表示 $e_{1:t-1}$,$K$ 和 $V$ 表示 $g_{1:j_{t-1}}$,$M$ 表示 mask,$\bigodot$ 表示逐元素乘积,$\bigotimes$ 表示矩阵乘法。下图展示了一个 editing casual attention 的例子:
最后便是模型训练,本文首先使用了 imitation learning strategy 的策略,即将前述由 DP 算法生成的 edting program 作为唯一的 ground-truth 使用 cross-entropy 损失进行训练:
其中,$z_t^*$ 表示第 $t$ 个位置的 ground-truth,$q_t$ 表示模型第 $t$ 个位置的预测为 $z_t^*$ 的概率。 但是这会导致 program aliasing 问题,即有多个 editing program 都可以将 sentence $x$ 转化为最终的 $y$,但是却都将它们归类为错误(只有用作 ground-truth 的那个才被当作正确的),导致模型 over-penalized, 从而导致模型的探索能力下降。为此,本文提出了使用 $policy\ gradient\ method(RL)$ 的强化学习方法来缓解这个问题(将其称为 peer-critic)。 具体而言,本文使用 $generator$ 生成的 glosses 和 ground-truth 进行计算得到的 BLEU-4 分数来作为奖励,并通过 minimize the negative expected reward 来训练模型:
其中 $\tilde{z}$ 表示模型 $P_{\theta}(z|x)$ 预测的 editing program,$r(·)$ 表示奖励函数,即 BLEU-4 分数。 由于 BLEU-4 分数的计算是不可导的,无法进行 back-propagation,本文使用了 REINFORCE 算法,使用 Monte-Carlo 采样来计算梯度:
其中,通过采样 $K = 5$ 次 $\tilde{z}$ 来计算近似的 expected rewards (即损失函数 $E[·]$)。最后,通过结合这两个损失函数,便可进行训练: